 \includegraphics{images/separable-crop}
## Separability by adding features
\includegraphics{images/separable-crop}
## Separability by adding features
 \includegraphics{images/separable_quad-crop}
## Separability by adding features
\includegraphics{images/separable_quad-crop}
## Separability by adding features
 \includegraphics{images/separable_quad_lin-crop}
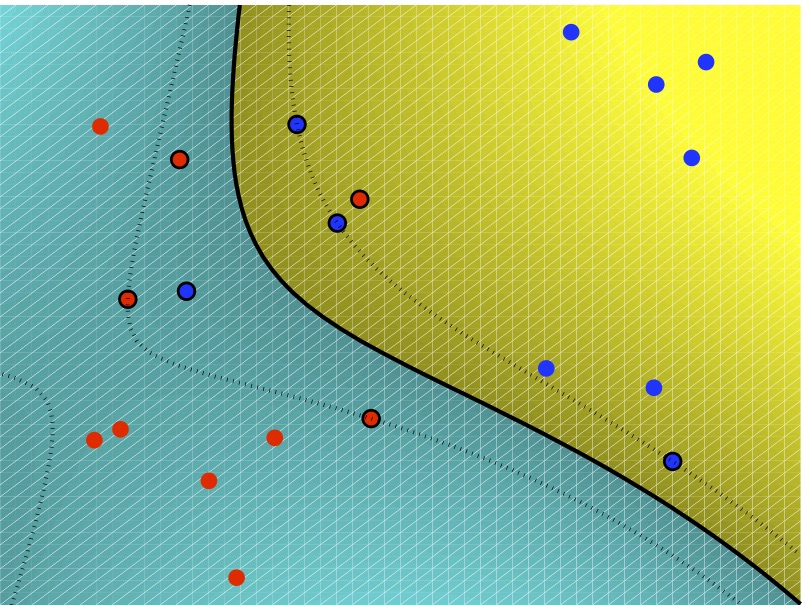
more flexible decision boundary $\approx$ enriched feature space
## Margin optimization in feature space
- Replacing ${{\x_i}}$ with $\phi({{\x_i}})$, the dual form becomes:
-------- -------------------------------------------------------------------------------------------------------------------
max $\sum_{i=1}^n\alpha_i-\frac{1}{2}\sum_{i,j=1}^n{{y}}_i{{y}}_j\alpha_i\alpha_j({\phi({{\x_i}})\cdot\phi({{\x_j}})})$
w.r.t. $\alpha_i$
s.t. $0\leq\alpha_i\leq C$ and $\sum_{i=1}^n\alpha_i{{y}}_i=0$
-------- -------------------------------------------------------------------------------------------------------------------
- Classification of an input $\x$ is given
by:
$$h_{{{\mathbf{w}}},w_0}({{\x}}) = \mbox{sign}\left(\sum_{i=1}^n\alpha_i{{y}}_i({\phi({{\x_i}})\cdot\phi({{\x}})})+w_0\right)$$
- Note that in the dual form, to do both SVM training
and prediction, we only ever need to compute *dot-products of
feature vectors*.
## Kernel functions
- Whenever a learning algorithm (such as SVMs) can be written in terms
of dot-products, it can be generalized to kernels.
- A *kernel* is any function
$K:\mathbb{R}^n\times\mathbb{R}^n\mapsto\mathbb{R}$ which
corresponds to a dot product for some feature mapping $\phi$:
$$K({{\x}}_1,{{\x}}_2)=\phi({{\x}}_1)\cdot\phi({{\x}}_2) \text{ for some }\phi.$$
- Conversely, by choosing feature mapping $\phi$, we implicitly choose
a kernel function
- Recall that
$\phi({{\x}}_1)\cdot \phi({{\x}}_2) \propto \cos \angle(\phi({{\x}}_1),\phi({{\x}}_2))$
where $\angle$ denotes the angle between the vectors, so a kernel
function can be thought of as a notion of
*similarity*.
## Example: Quadratic kernel
- Let
$K(\x,{\bf z} )= \left(\x\cdot {\bf z}\right)^2$.
- Is this a kernel? $$K(\x,{\bf z}) = \left( \sum_{i=1}^p x_i z_i\right) \left( \sum_{j=1}^p x_j z_j \right)
= \sum_{i,j\in\{1\ldots p\}} \left( x_i x_j \right) \left( z_i z_j \right)$$
- Hence, it is a kernel, with feature mapping:
$$\phi(\x) = \langle x_1^2, ~x_1x_2, ~\ldots, ~x_1x_p, ~x_2x_1, ~x_2^2, ~\ldots, ~x_p^2 \rangle$$
Feature vector includes all squares of elements and all cross terms.
- Note that computing $\phi$ takes $O(p^2)$ but *computing $K$
takes only $O(p)$*!
## Polynomial kernels
- More generally,
$K(\x,{{\mathbf{z}}}) = (1 + \x\cdot{{\mathbf{z}}})^d$
is a kernel, for any positive integer $d$.
- If we expanded the product above, we get terms for all degrees up to and including $d$ (in $x_i$ and $z_i$).
- If we use the primal form of the SVM, each of these will have a
weight associated with it!
- *Curse of dimensionality:* it is very expensive both
to optimize and to predict with an SVM in primal form with many features.
## The "kernel trick"
- If we work with the dual, we do not actually have to ever compute
the features using $\phi$. We just have to compute the similarity
$K$.
- That is, we can solve the dual for the $\alpha_i$:
-------- -------------------------------------------------------------------------------------------------------------- ------------------------------------------------------------------------
max $\sum_{i=1}^n\alpha_i-\frac{1}{2}\sum_{i,j=1}^n{{y}}_i{{y}}_j\alpha_i\alpha_j K(\x_i,\x_j)$ w.r.t. $\alpha_i$
s.t. $0\leq\alpha_i\leq C$, $\sum_{i=1}^n\alpha_i{{y}}_i=0$
-------- -------------------------------------------------------------------------------------------------------------- -----------------------------------------------------------------------
- The class of a new input $\x$ is computed
as:
$$\hspace{-0.5in}h_{{{\mathbf{w}}},w_0}(\x) = \mbox{sign} \left( \sum_{i=1}^n \alpha_i y_i K(\x_i,\x) + w_0 \right)$$
- Often, $K(\cdot,\cdot)$ can be evaluated in $O(p)$ time—a big
savings!
## Some other (fairly generic) kernel functions
- $K(\x,{{\mathbf{z}}})=(1+\x\cdot{{\mathbf{z}}})^d$
– feature expansion has all monomial terms of degree $\leq d$.
- Radial Basis Function (RBF)/Gaussian kernel (**most popular**):
$$K(\x,{{\mathbf{z}}}) = \exp(-\gamma \|\x-{{\mathbf{z}}}\|^2)$$
The kernel has an infinite-dimensional feature
expansion, but dot-products can still be computed in $O(n)$!
- Sigmoid kernel:
$$K(\x,{{\mathbf{z}}}) = \tanh (c_1 \x\cdot{{\mathbf{z}}}+ c_2)$$
## Example: Radial Basis Function (RBF) / Gaussian kernel
\includegraphics{images/separable_quad_lin-crop}
more flexible decision boundary $\approx$ enriched feature space
## Margin optimization in feature space
- Replacing ${{\x_i}}$ with $\phi({{\x_i}})$, the dual form becomes:
-------- -------------------------------------------------------------------------------------------------------------------
max $\sum_{i=1}^n\alpha_i-\frac{1}{2}\sum_{i,j=1}^n{{y}}_i{{y}}_j\alpha_i\alpha_j({\phi({{\x_i}})\cdot\phi({{\x_j}})})$
w.r.t. $\alpha_i$
s.t. $0\leq\alpha_i\leq C$ and $\sum_{i=1}^n\alpha_i{{y}}_i=0$
-------- -------------------------------------------------------------------------------------------------------------------
- Classification of an input $\x$ is given
by:
$$h_{{{\mathbf{w}}},w_0}({{\x}}) = \mbox{sign}\left(\sum_{i=1}^n\alpha_i{{y}}_i({\phi({{\x_i}})\cdot\phi({{\x}})})+w_0\right)$$
- Note that in the dual form, to do both SVM training
and prediction, we only ever need to compute *dot-products of
feature vectors*.
## Kernel functions
- Whenever a learning algorithm (such as SVMs) can be written in terms
of dot-products, it can be generalized to kernels.
- A *kernel* is any function
$K:\mathbb{R}^n\times\mathbb{R}^n\mapsto\mathbb{R}$ which
corresponds to a dot product for some feature mapping $\phi$:
$$K({{\x}}_1,{{\x}}_2)=\phi({{\x}}_1)\cdot\phi({{\x}}_2) \text{ for some }\phi.$$
- Conversely, by choosing feature mapping $\phi$, we implicitly choose
a kernel function
- Recall that
$\phi({{\x}}_1)\cdot \phi({{\x}}_2) \propto \cos \angle(\phi({{\x}}_1),\phi({{\x}}_2))$
where $\angle$ denotes the angle between the vectors, so a kernel
function can be thought of as a notion of
*similarity*.
## Example: Quadratic kernel
- Let
$K(\x,{\bf z} )= \left(\x\cdot {\bf z}\right)^2$.
- Is this a kernel? $$K(\x,{\bf z}) = \left( \sum_{i=1}^p x_i z_i\right) \left( \sum_{j=1}^p x_j z_j \right)
= \sum_{i,j\in\{1\ldots p\}} \left( x_i x_j \right) \left( z_i z_j \right)$$
- Hence, it is a kernel, with feature mapping:
$$\phi(\x) = \langle x_1^2, ~x_1x_2, ~\ldots, ~x_1x_p, ~x_2x_1, ~x_2^2, ~\ldots, ~x_p^2 \rangle$$
Feature vector includes all squares of elements and all cross terms.
- Note that computing $\phi$ takes $O(p^2)$ but *computing $K$
takes only $O(p)$*!
## Polynomial kernels
- More generally,
$K(\x,{{\mathbf{z}}}) = (1 + \x\cdot{{\mathbf{z}}})^d$
is a kernel, for any positive integer $d$.
- If we expanded the product above, we get terms for all degrees up to and including $d$ (in $x_i$ and $z_i$).
- If we use the primal form of the SVM, each of these will have a
weight associated with it!
- *Curse of dimensionality:* it is very expensive both
to optimize and to predict with an SVM in primal form with many features.
## The "kernel trick"
- If we work with the dual, we do not actually have to ever compute
the features using $\phi$. We just have to compute the similarity
$K$.
- That is, we can solve the dual for the $\alpha_i$:
-------- -------------------------------------------------------------------------------------------------------------- ------------------------------------------------------------------------
max $\sum_{i=1}^n\alpha_i-\frac{1}{2}\sum_{i,j=1}^n{{y}}_i{{y}}_j\alpha_i\alpha_j K(\x_i,\x_j)$ w.r.t. $\alpha_i$
s.t. $0\leq\alpha_i\leq C$, $\sum_{i=1}^n\alpha_i{{y}}_i=0$
-------- -------------------------------------------------------------------------------------------------------------- -----------------------------------------------------------------------
- The class of a new input $\x$ is computed
as:
$$\hspace{-0.5in}h_{{{\mathbf{w}}},w_0}(\x) = \mbox{sign} \left( \sum_{i=1}^n \alpha_i y_i K(\x_i,\x) + w_0 \right)$$
- Often, $K(\cdot,\cdot)$ can be evaluated in $O(p)$ time—a big
savings!
## Some other (fairly generic) kernel functions
- $K(\x,{{\mathbf{z}}})=(1+\x\cdot{{\mathbf{z}}})^d$
– feature expansion has all monomial terms of degree $\leq d$.
- Radial Basis Function (RBF)/Gaussian kernel (**most popular**):
$$K(\x,{{\mathbf{z}}}) = \exp(-\gamma \|\x-{{\mathbf{z}}}\|^2)$$
The kernel has an infinite-dimensional feature
expansion, but dot-products can still be computed in $O(n)$!
- Sigmoid kernel:
$$K(\x,{{\mathbf{z}}}) = \tanh (c_1 \x\cdot{{\mathbf{z}}}+ c_2)$$
## Example: Radial Basis Function (RBF) / Gaussian kernel
 \includegraphics{images/NoSep_RBFSVM}
## Second brush with “feature construction”
- With polynomial regression, we saw how to construct features to
increase the size of the hypothesis space
- This gave more flexible regression functions
- Kernels offer a similar function with SVMs: More flexible decision
boundaries
- Often not clear what kernel is appropriate for the data at hand; can choose using validation set
## SVM Summary
- Linear SVMs find a maximum margin linear separator between the classes
- If classes are not linearly separable,
- Use the soft-margin formulation to allow for errors
- Use a kernel to find a boundary that is non-linear
- Or both (usually both)
- Choosing the soft margin parameter C and choosing the kernel and any kernel parameters must be done using validation (not training)
## Getting SVMs to work in practice
- `libsvm` and `liblinear` are popular
- Scaling the inputs ($\x_i$) is very important. (E.g. make all mean zero variance 1.)
- Two important choices:
- Kernel (and kernel parameters, e.g. $\gamma$ for the RBF kernel)
- Regularization parameter $C$
- The parameters may interact -- best $C$ may depend on $\gamma$
- Together, these control overfitting: best to do a *within-fold
parameter search, using a validation set*
- Clues you might be overfitting: Low margin (large weights), Large fraction of instances are support vectors
## Kernels beyond SVMs
- Remember, a kernel is a special kind of similarity measure
- A lot of research has to do with defining new kernel
functions, suitable to particular tasks / kinds of input objects
- Many kernels are available:
- Information diffusion kernels (Lafferty and Lebanon, 2002)
- Diffusion kernels on graphs (Kondor and Jebara 2003)
- String kernels for text classification (Lodhi et al, 2002)
- String kernels for protein classification (e.g., Leslie et
al, 2002)
... and others!
## Instance-based learning, Decision Trees
- Non-parametric learning
- $k$-nearest neighbour
- Efficient implementations
- Variations
## Parametric supervised learning
- So far, we have assumed that we have a data set $D$ of labeled
examples
- From this, we learn a *parameter vector* of a
*fixed size* such that some error measure based on the
training data is minimized
- These methods are called *parametric*, and their main
goal is to summarize the data using the parameters
- Parametric methods are typically global, i.e. have one set of
parameters for the entire data space
- But what if we just remembered the data?
- When new instances arrive, we will compare them with what we know,
and determine the answer
## Non-parametric (memory-based) learning methods
- Key idea: just store all training examples
$\langle \x_i, y_i\rangle$
- When a query is made, compute the value of the new instance based on
the values of the *closest (most similar) points*
- Requirements:
- A distance function
- How many closest points (neighbors) to look at?
- How do we compute the value of the new point based on the
existing values?
## Simple idea: Connect the dots!
```{r echo=F,message=F,fig.height=6,fig.width=8}
library(ggplot2);library(dplyr);library(class)
testx <- sort(bc$Radius.Mean)
#Add points a little bit on either side of midpoints as test points
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001))
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
test$y <- as.numeric(class::knn(bc[,'Radius.Mean'],bctest,bc$Outcome)) - 1
bc <- bc %>% mutate(binOutcome = as.numeric(Outcome == "R"))
ggplot(bc,aes(x=Radius.Mean,y=binOutcome)) + geom_point(aes(colour=Outcome)) + geom_line(data=test,aes(x=x,y=y))
```
## Simple idea: Connect the dots!
```{r echo=F,message=F,fig.height=6,fig.width=8}
library(ggplot2);library(dplyr);library(caret)
bcr <- filter(bc,Outcome=="R")
testx <- sort(bcr$Radius.Mean)
#Add points a little bit on either side of midpoints as test points
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001))
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
test$y <- knnregTrain(bcr[,'Radius.Mean'],bctest,bcr$Time,k=1)
ggplot(bcr,aes(x=Radius.Mean,y=Time)) + geom_point(colour="#00BFC4") + geom_line(data=test,aes(x=x,y=y))
```
## One-nearest neighbor
- Given: Training data
$\{(\x_i,y_i)\}_{i=1}^n$, distance metric $d$
on ${{\cal X}}$.
- Training: Nothing to do! (just store data)
- Prediction: for $\x\in{{\cal X}}$
- Find nearest training sample to $\x$.\
$$i^*\in\arg\min_id(\x_i,\x)$$
- Predict $y=y_{i^*}$.
## What does the approximator look like?
- Nearest-neighbor does not explicitly compute decision boundaries
- But the effective decision boundaries are a subset of the
*Voronoi diagram* for the training data
\includegraphics{images/NoSep_RBFSVM}
## Second brush with “feature construction”
- With polynomial regression, we saw how to construct features to
increase the size of the hypothesis space
- This gave more flexible regression functions
- Kernels offer a similar function with SVMs: More flexible decision
boundaries
- Often not clear what kernel is appropriate for the data at hand; can choose using validation set
## SVM Summary
- Linear SVMs find a maximum margin linear separator between the classes
- If classes are not linearly separable,
- Use the soft-margin formulation to allow for errors
- Use a kernel to find a boundary that is non-linear
- Or both (usually both)
- Choosing the soft margin parameter C and choosing the kernel and any kernel parameters must be done using validation (not training)
## Getting SVMs to work in practice
- `libsvm` and `liblinear` are popular
- Scaling the inputs ($\x_i$) is very important. (E.g. make all mean zero variance 1.)
- Two important choices:
- Kernel (and kernel parameters, e.g. $\gamma$ for the RBF kernel)
- Regularization parameter $C$
- The parameters may interact -- best $C$ may depend on $\gamma$
- Together, these control overfitting: best to do a *within-fold
parameter search, using a validation set*
- Clues you might be overfitting: Low margin (large weights), Large fraction of instances are support vectors
## Kernels beyond SVMs
- Remember, a kernel is a special kind of similarity measure
- A lot of research has to do with defining new kernel
functions, suitable to particular tasks / kinds of input objects
- Many kernels are available:
- Information diffusion kernels (Lafferty and Lebanon, 2002)
- Diffusion kernels on graphs (Kondor and Jebara 2003)
- String kernels for text classification (Lodhi et al, 2002)
- String kernels for protein classification (e.g., Leslie et
al, 2002)
... and others!
## Instance-based learning, Decision Trees
- Non-parametric learning
- $k$-nearest neighbour
- Efficient implementations
- Variations
## Parametric supervised learning
- So far, we have assumed that we have a data set $D$ of labeled
examples
- From this, we learn a *parameter vector* of a
*fixed size* such that some error measure based on the
training data is minimized
- These methods are called *parametric*, and their main
goal is to summarize the data using the parameters
- Parametric methods are typically global, i.e. have one set of
parameters for the entire data space
- But what if we just remembered the data?
- When new instances arrive, we will compare them with what we know,
and determine the answer
## Non-parametric (memory-based) learning methods
- Key idea: just store all training examples
$\langle \x_i, y_i\rangle$
- When a query is made, compute the value of the new instance based on
the values of the *closest (most similar) points*
- Requirements:
- A distance function
- How many closest points (neighbors) to look at?
- How do we compute the value of the new point based on the
existing values?
## Simple idea: Connect the dots!
```{r echo=F,message=F,fig.height=6,fig.width=8}
library(ggplot2);library(dplyr);library(class)
testx <- sort(bc$Radius.Mean)
#Add points a little bit on either side of midpoints as test points
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001))
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
test$y <- as.numeric(class::knn(bc[,'Radius.Mean'],bctest,bc$Outcome)) - 1
bc <- bc %>% mutate(binOutcome = as.numeric(Outcome == "R"))
ggplot(bc,aes(x=Radius.Mean,y=binOutcome)) + geom_point(aes(colour=Outcome)) + geom_line(data=test,aes(x=x,y=y))
```
## Simple idea: Connect the dots!
```{r echo=F,message=F,fig.height=6,fig.width=8}
library(ggplot2);library(dplyr);library(caret)
bcr <- filter(bc,Outcome=="R")
testx <- sort(bcr$Radius.Mean)
#Add points a little bit on either side of midpoints as test points
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001))
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
test$y <- knnregTrain(bcr[,'Radius.Mean'],bctest,bcr$Time,k=1)
ggplot(bcr,aes(x=Radius.Mean,y=Time)) + geom_point(colour="#00BFC4") + geom_line(data=test,aes(x=x,y=y))
```
## One-nearest neighbor
- Given: Training data
$\{(\x_i,y_i)\}_{i=1}^n$, distance metric $d$
on ${{\cal X}}$.
- Training: Nothing to do! (just store data)
- Prediction: for $\x\in{{\cal X}}$
- Find nearest training sample to $\x$.\
$$i^*\in\arg\min_id(\x_i,\x)$$
- Predict $y=y_{i^*}$.
## What does the approximator look like?
- Nearest-neighbor does not explicitly compute decision boundaries
- But the effective decision boundaries are a subset of the
*Voronoi diagram* for the training data
 \includegraphics{images/knn_v2}
Each line segment is equidistant between two points classes.
## What kind of distance metric?
- Euclidean distance
- Maximum/minimum difference along any axis
- Weighted Euclidean distance (with weights based on domain knowledge)
$$d({\bf x}, {\bf x'})=\sum_{j=1}^p u_j ({x}_j - {x'}_j)^2$$
- An arbitrary distance or similarity function $d$, specific for the
application at hand (works best, if you have one)
## Distance metric is really important!
\includegraphics{images/knn_v2}
Each line segment is equidistant between two points classes.
## What kind of distance metric?
- Euclidean distance
- Maximum/minimum difference along any axis
- Weighted Euclidean distance (with weights based on domain knowledge)
$$d({\bf x}, {\bf x'})=\sum_{j=1}^p u_j ({x}_j - {x'}_j)^2$$
- An arbitrary distance or similarity function $d$, specific for the
application at hand (works best, if you have one)
## Distance metric is really important!
 \includegraphics{images/scaling}
Left: attributes weighted equally Right: unequal weighting
## Distance metric tricks
- You may need to do preprocessing:
- *Scale* the input dimensions (or normalize them)
- Remove noisy inputs
- Determine weights for attributes based on cross-validation (or
information-theoretic methods)
- Distance metric is often domain-specific
- E.g. string edit distance in bioinformatics
- E.g. trajectory distance in time series models for walking data
- Distance metric can be learned sometimes (more on this later)
## $k$-nearest neighbor
- Given: Training data
$\{(\x_i,y_i)\}_{i=1}^n$, distance metric $d$
on ${{\cal X}}$.
- Learning: Nothing to do!
- Prediction: for $\x\in{{\cal X}}$
- Find the $k$ nearest training samples to
$\x$.\
Let their indices be $i_1, i_2, \ldots, i_k$.
- Predict
- $y=$ mean/median of $\{y_{i_1},y_{i_2},\ldots, y_{i_k}\}$
for regression
- $y=$ majority of $\{y_{i_1},y_{i_2},\ldots, y_{i_k}\}$ for
classification, or empirical probability of each class
```{r echo=F,message=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(class)
testx <- sort(bc$Radius.Mean)
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001,seq(min(testx),max(testx),length.out=1000)))
#Add points a little bit on either side of midpoints as test points
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
plts <- list()
for (k in c(1,2,3,5,10,15)) {
test$y <- as.numeric(class::knn(bc[,'Radius.Mean'],bctest,bc$Outcome,k=k,use.all=T)) - 1
bc <- bc %>% mutate(binOutcome = as.numeric(Outcome == "R"))
.e <- environment()
plts[[length(plts)+1]] <- ggplot(bc,aes(x=Radius.Mean,y=binOutcome),environment=.e) + geom_point(aes(colour=Outcome)) + geom_line(data=test,aes(x=x,y=y))
plts[[length(plts)]]$k <- k
}
for ( pl in 1:length(plts) ) {
writeLines(sprintf("## k-NN classification, Majority, k=%d\n\n",plts[[pl]]$k))
plot(plts[[pl]])
writeLines("\n\n")
}
```
```{r echo=F,message=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(class)
testx <- sort(bc$Radius.Mean)
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001,seq(min(testx),max(testx),length.out=1000)))
#Add points a little bit on either side of midpoints as test points
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
plts <- list()
for (k in c(1,2,3,5,10,15,20,25)) {
knnout <- class::knn(bc[,'Radius.Mean'],bctest,bc$Outcome,k=k,prob=T)
knnc <- as.numeric(knnout) - 1
knnp <- attr(knnout,"prob")
#knn function gives "prob" of majority class; need probability of class 1.
test$y <- knnc*knnp + (1 - knnc)*(1 - knnp)
bc <- bc %>% mutate(binOutcome = as.numeric(Outcome == "R"))
.e <- environment()
plts[[length(plts)+1]] <- ggplot(bc,aes(x=Radius.Mean,y=binOutcome),environment=.e) + geom_point(aes(colour=Outcome)) + geom_line(data=test,aes(x=x,y=y))
plts[[length(plts)]]$k <- k
}
for ( pl in 1:length(plts) ) {
writeLines(sprintf("## k-NN classification, Mean (prob), k=%d\n\n",plts[[pl]]$k))
plot(plts[[pl]])
writeLines("\n\n")
}
```
```{r echo=F,message=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(caret)
bcr <- filter(bc,Outcome=="R")
testx <- sort(bcr$Radius.Mean)
#Add points a little bit on either side of midpoints as test points
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001,seq(min(testx),max(testx),length.out=1000)))
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
plts <- list()
for (k in c(1,2,3,5,10,15,20,25)) {
test$y <- knnregTrain(bcr[,'Radius.Mean'],bctest,bcr$Time,k=k)
.e <- environment()
plts[[length(plts)+1]] <- ggplot(bcr,aes(x=Radius.Mean,y=Time)) + geom_point(colour="#00BFC4") + geom_line(data=test,aes(x=x,y=y))
plts[[length(plts)]]$k <- k
}
for ( pl in 1:length(plts) ) {
writeLines(sprintf("## k-NN regression, Mean, k=%d\n\n",plts[[pl]]$k))
plot(plts[[pl]])
writeLines("\n\n")
}
```
## Bias-variance trade-off
- If $k$ is low, very non-linear functions can be approximated, but we
also capture the noise in the data\
Bias is low, variance is high
- If $k$ is high, the output is much smoother, less sensitive to data
variation\
High bias, low variance
- A validation set can be used to pick the best $k$
## LOESS Smoothing
- Quadratic Regression
- Uses the closest $\alpha$ percent of the training set to make each prediction, called "span"
```{r echo=F}
ggplot(data.frame(Relative.Distance = c(-1, 1)), aes(Relative.Distance)) +
stat_function(fun = function(x) (1 - abs(x)^3)^3, geom = "line") + ggtitle("LOESS Weighting Function") + ylab("Weight")
```
```{r echo=F,message=F,warning=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(caret)
bcr <- filter(bc,Outcome=="R")
plts <- list()
for (alpha in c(0.2,0.3,0.4,0.5,0.6,0.7,0.75,0.8,0.9,1.0)) {
.e <- environment()
plts[[length(plts)+1]] <- ggplot(bcr,aes(x=Radius.Mean,y=Time)) + geom_point(colour="#00BFC4") + geom_smooth(method="loess",span=alpha,se=F,n=500,na.rm=F)
plts[[length(plts)]]$alpha <- alpha
}
for ( pl in 1:length(plts) ) {
writeLines(sprintf("## LOESS Smoothing, alpha=%.3f\n\n",plts[[pl]]$alpha))
plot(plts[[pl]])
writeLines("\n\n")
}
```
## Generalized Additive Models
- Also smooth functions of the input variables; appearance similar to LOESS but with deeper theory.
- Based on regression splines
## GAM Smoothed Example
```{r echo=F,message=F,warning=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(caret)
bcr <- filter(bc,Outcome=="R")
ggplot(bcr,aes(x=Radius.Mean,y=Time)) + geom_point(colour="#00BFC4") + geom_smooth(method="lm", formula = y ~ x, colour = "#FF0000", se = F, linetype = "dotted") + geom_smooth(method="gam",formula = y ~ s(x), se = FALSE)
```
## Lazy and eager learning
- *Lazy*: wait for query before generalizing
E.g. Nearest Neighbor
- *Eager*: generalize before seeing query
E.g. SVM, Linear regression
Does it matter?
## Pros and cons of lazy and eager learning
- Eager learners must create global approximation
- Lazy learners can create many local approximations
- An eager learner does the work off-line, summarizes lots of data
with few parameters
- A lazy learner has to do lots of work sifting through the data at
query time
- Typically lazy learners take longer time to answer queries and
require more space
## When to consider nonparametric methods
- When you have: instances that map to points in ${\mathbb R}^p$,
not too many attributes per instance ($< 20$), lots of data
\includegraphics{images/scaling}
Left: attributes weighted equally Right: unequal weighting
## Distance metric tricks
- You may need to do preprocessing:
- *Scale* the input dimensions (or normalize them)
- Remove noisy inputs
- Determine weights for attributes based on cross-validation (or
information-theoretic methods)
- Distance metric is often domain-specific
- E.g. string edit distance in bioinformatics
- E.g. trajectory distance in time series models for walking data
- Distance metric can be learned sometimes (more on this later)
## $k$-nearest neighbor
- Given: Training data
$\{(\x_i,y_i)\}_{i=1}^n$, distance metric $d$
on ${{\cal X}}$.
- Learning: Nothing to do!
- Prediction: for $\x\in{{\cal X}}$
- Find the $k$ nearest training samples to
$\x$.\
Let their indices be $i_1, i_2, \ldots, i_k$.
- Predict
- $y=$ mean/median of $\{y_{i_1},y_{i_2},\ldots, y_{i_k}\}$
for regression
- $y=$ majority of $\{y_{i_1},y_{i_2},\ldots, y_{i_k}\}$ for
classification, or empirical probability of each class
```{r echo=F,message=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(class)
testx <- sort(bc$Radius.Mean)
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001,seq(min(testx),max(testx),length.out=1000)))
#Add points a little bit on either side of midpoints as test points
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
plts <- list()
for (k in c(1,2,3,5,10,15)) {
test$y <- as.numeric(class::knn(bc[,'Radius.Mean'],bctest,bc$Outcome,k=k,use.all=T)) - 1
bc <- bc %>% mutate(binOutcome = as.numeric(Outcome == "R"))
.e <- environment()
plts[[length(plts)+1]] <- ggplot(bc,aes(x=Radius.Mean,y=binOutcome),environment=.e) + geom_point(aes(colour=Outcome)) + geom_line(data=test,aes(x=x,y=y))
plts[[length(plts)]]$k <- k
}
for ( pl in 1:length(plts) ) {
writeLines(sprintf("## k-NN classification, Majority, k=%d\n\n",plts[[pl]]$k))
plot(plts[[pl]])
writeLines("\n\n")
}
```
```{r echo=F,message=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(class)
testx <- sort(bc$Radius.Mean)
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001,seq(min(testx),max(testx),length.out=1000)))
#Add points a little bit on either side of midpoints as test points
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
plts <- list()
for (k in c(1,2,3,5,10,15,20,25)) {
knnout <- class::knn(bc[,'Radius.Mean'],bctest,bc$Outcome,k=k,prob=T)
knnc <- as.numeric(knnout) - 1
knnp <- attr(knnout,"prob")
#knn function gives "prob" of majority class; need probability of class 1.
test$y <- knnc*knnp + (1 - knnc)*(1 - knnp)
bc <- bc %>% mutate(binOutcome = as.numeric(Outcome == "R"))
.e <- environment()
plts[[length(plts)+1]] <- ggplot(bc,aes(x=Radius.Mean,y=binOutcome),environment=.e) + geom_point(aes(colour=Outcome)) + geom_line(data=test,aes(x=x,y=y))
plts[[length(plts)]]$k <- k
}
for ( pl in 1:length(plts) ) {
writeLines(sprintf("## k-NN classification, Mean (prob), k=%d\n\n",plts[[pl]]$k))
plot(plts[[pl]])
writeLines("\n\n")
}
```
```{r echo=F,message=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(caret)
bcr <- filter(bc,Outcome=="R")
testx <- sort(bcr$Radius.Mean)
#Add points a little bit on either side of midpoints as test points
testx <- sort(c(testx,rowMeans(embed(testx,2)) + 0.00001,rowMeans(embed(testx,2)) - 0.00001,seq(min(testx),max(testx),length.out=1000)))
test <- data.frame(x=testx)
bctest <- data.frame(Radius.Mean=test$x)
plts <- list()
for (k in c(1,2,3,5,10,15,20,25)) {
test$y <- knnregTrain(bcr[,'Radius.Mean'],bctest,bcr$Time,k=k)
.e <- environment()
plts[[length(plts)+1]] <- ggplot(bcr,aes(x=Radius.Mean,y=Time)) + geom_point(colour="#00BFC4") + geom_line(data=test,aes(x=x,y=y))
plts[[length(plts)]]$k <- k
}
for ( pl in 1:length(plts) ) {
writeLines(sprintf("## k-NN regression, Mean, k=%d\n\n",plts[[pl]]$k))
plot(plts[[pl]])
writeLines("\n\n")
}
```
## Bias-variance trade-off
- If $k$ is low, very non-linear functions can be approximated, but we
also capture the noise in the data\
Bias is low, variance is high
- If $k$ is high, the output is much smoother, less sensitive to data
variation\
High bias, low variance
- A validation set can be used to pick the best $k$
## LOESS Smoothing
- Quadratic Regression
- Uses the closest $\alpha$ percent of the training set to make each prediction, called "span"
```{r echo=F}
ggplot(data.frame(Relative.Distance = c(-1, 1)), aes(Relative.Distance)) +
stat_function(fun = function(x) (1 - abs(x)^3)^3, geom = "line") + ggtitle("LOESS Weighting Function") + ylab("Weight")
```
```{r echo=F,message=F,warning=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(caret)
bcr <- filter(bc,Outcome=="R")
plts <- list()
for (alpha in c(0.2,0.3,0.4,0.5,0.6,0.7,0.75,0.8,0.9,1.0)) {
.e <- environment()
plts[[length(plts)+1]] <- ggplot(bcr,aes(x=Radius.Mean,y=Time)) + geom_point(colour="#00BFC4") + geom_smooth(method="loess",span=alpha,se=F,n=500,na.rm=F)
plts[[length(plts)]]$alpha <- alpha
}
for ( pl in 1:length(plts) ) {
writeLines(sprintf("## LOESS Smoothing, alpha=%.3f\n\n",plts[[pl]]$alpha))
plot(plts[[pl]])
writeLines("\n\n")
}
```
## Generalized Additive Models
- Also smooth functions of the input variables; appearance similar to LOESS but with deeper theory.
- Based on regression splines
## GAM Smoothed Example
```{r echo=F,message=F,warning=F,fig.height=6,fig.width=8,results='asis'}
library(ggplot2);library(dplyr);library(caret)
bcr <- filter(bc,Outcome=="R")
ggplot(bcr,aes(x=Radius.Mean,y=Time)) + geom_point(colour="#00BFC4") + geom_smooth(method="lm", formula = y ~ x, colour = "#FF0000", se = F, linetype = "dotted") + geom_smooth(method="gam",formula = y ~ s(x), se = FALSE)
```
## Lazy and eager learning
- *Lazy*: wait for query before generalizing
E.g. Nearest Neighbor
- *Eager*: generalize before seeing query
E.g. SVM, Linear regression
Does it matter?
## Pros and cons of lazy and eager learning
- Eager learners must create global approximation
- Lazy learners can create many local approximations
- An eager learner does the work off-line, summarizes lots of data
with few parameters
- A lazy learner has to do lots of work sifting through the data at
query time
- Typically lazy learners take longer time to answer queries and
require more space
## When to consider nonparametric methods
- When you have: instances that map to points in ${\mathbb R}^p$,
not too many attributes per instance ($< 20$), lots of data
| - Advantages: - Training is very fast - Easy to learn complex functions over few variables - Can give back confidence intervals in addition to the prediction - *Often wins* if you have enough data | - Disadvantages: - Slow at query time - Query answering complexity depends on the number of instances - *Easily fooled by irrelevant attributes* (for most distance metrics) - "Inference" is not possible |
 \includegraphics{images/WiscDecTree}
- Internal nodes are tests on the values of different attributes
- Tests can be binary or multi-valued
- Each training example
$\langle\x_i,y_i\rangle$ falls in precisely
one leaf.
## Using decision trees for classification
How do we classify a new a new instance, e.g.: *radius=18,
texture=12, …*
\includegraphics{images/WiscDecTree}
- At every node, test the corresponding attribute
- Follow the appropriate branch of the tree
- At a leaf, one can predict the class of the majority of the examples
for the corresponding leaf, or the probabilities of the two classes.
## Decision trees as logical representations
A decision tree can be converted an equivalent set of if-then rules.
\includegraphics{images/WiscDecTree}
IF THEN most likely class is
---------------------------------------- ---------------------------
radius $>17.5$ AND texture $>21.5$ R
radius $>17.5$ AND texture $\leq 21.5$ N
radius $\leq17.5$ N
## Decision trees as logical representations
A decision tree can be converted an equivalent set of if-then rules.
\includegraphics{images/WiscDecTree}
IF THEN P(R) is
------------------------------------- --------------
radius$> 17.5$ AND texture$> 21.5$ $33/(33+5)$
radius$> 17.5$ AND texture$\leq 21.5$ $12/(12+31)$
radius$\leq 17.5$ $25/(25+64)$
## Decision trees, more formally {.smaller}
- Each internal node contains a *test*, on the value of
one (typically) or more feature values
- A test produces discrete outcomes, e.g.,
- radius $> 17.5$
- radius $\in [12,18]$
- grade is $\in \{A,B,C\}$
- color is RED
- For discrete features, typically branch on some, or all, possible
values
- For real features, typically branch based on a threshold value
- *A finite set of possible tests* is usually decided
before learning the tree; learning comprises choosing the shape of
the tree and the tests at every node.
## More on tests for real-valued features
- Suppose feature $j$ is real-valued,
- How do we choose a finite set of possible thresholds, for tests of
the form $x_j > \tau$?
- Regression: choose midpoints of the observed data values,
$x_{1,j}, x_{2,j}, \ldots, x_{m,j}$
\includegraphics{images/WiscDecTree}
- Internal nodes are tests on the values of different attributes
- Tests can be binary or multi-valued
- Each training example
$\langle\x_i,y_i\rangle$ falls in precisely
one leaf.
## Using decision trees for classification
How do we classify a new a new instance, e.g.: *radius=18,
texture=12, …*
\includegraphics{images/WiscDecTree}
- At every node, test the corresponding attribute
- Follow the appropriate branch of the tree
- At a leaf, one can predict the class of the majority of the examples
for the corresponding leaf, or the probabilities of the two classes.
## Decision trees as logical representations
A decision tree can be converted an equivalent set of if-then rules.
\includegraphics{images/WiscDecTree}
IF THEN most likely class is
---------------------------------------- ---------------------------
radius $>17.5$ AND texture $>21.5$ R
radius $>17.5$ AND texture $\leq 21.5$ N
radius $\leq17.5$ N
## Decision trees as logical representations
A decision tree can be converted an equivalent set of if-then rules.
\includegraphics{images/WiscDecTree}
IF THEN P(R) is
------------------------------------- --------------
radius$> 17.5$ AND texture$> 21.5$ $33/(33+5)$
radius$> 17.5$ AND texture$\leq 21.5$ $12/(12+31)$
radius$\leq 17.5$ $25/(25+64)$
## Decision trees, more formally {.smaller}
- Each internal node contains a *test*, on the value of
one (typically) or more feature values
- A test produces discrete outcomes, e.g.,
- radius $> 17.5$
- radius $\in [12,18]$
- grade is $\in \{A,B,C\}$
- color is RED
- For discrete features, typically branch on some, or all, possible
values
- For real features, typically branch based on a threshold value
- *A finite set of possible tests* is usually decided
before learning the tree; learning comprises choosing the shape of
the tree and the tests at every node.
## More on tests for real-valued features
- Suppose feature $j$ is real-valued,
- How do we choose a finite set of possible thresholds, for tests of
the form $x_j > \tau$?
- Regression: choose midpoints of the observed data values,
$x_{1,j}, x_{2,j}, \ldots, x_{m,j}$
 \includegraphics{images/Line1}
- Classification: choose midpoints of data values with different
$y$ values
\includegraphics{images/Line1}
- Classification: choose midpoints of data values with different
$y$ values
 \includegraphics{images/Line2}
## Representational power and efficiency of decision trees
- Suppose the input ${\bf x}$ consists of $n$ binary features
- How can a decision tree represent:
- $y = x_1$ AND $x_2$ AND ... AND $x_n$
- $y = x_1$ OR $x_2$ OR ... OR $x_n$
- $y = x_1$ XOR $x_2$ XOR ... XOR $x_n$
## Representational power and efficiency of decision trees
- With typical univariate tests, AND and OR are easy, taking $O(n)$
tests
- Parity/XOR type problems are hard, taking $O(2^n)$ tests
- With real-valued features, decision trees are good at problems in
which the class label is **constant in large, connected,
axis-orthogonal regions of the input space.**
## An artificial example
\includegraphics{images/Line2}
## Representational power and efficiency of decision trees
- Suppose the input ${\bf x}$ consists of $n$ binary features
- How can a decision tree represent:
- $y = x_1$ AND $x_2$ AND ... AND $x_n$
- $y = x_1$ OR $x_2$ OR ... OR $x_n$
- $y = x_1$ XOR $x_2$ XOR ... XOR $x_n$
## Representational power and efficiency of decision trees
- With typical univariate tests, AND and OR are easy, taking $O(n)$
tests
- Parity/XOR type problems are hard, taking $O(2^n)$ tests
- With real-valued features, decision trees are good at problems in
which the class label is **constant in large, connected,
axis-orthogonal regions of the input space.**
## An artificial example
 \includegraphics{images/DT_Data}
## Example: Decision tree decision surface
\includegraphics{images/DT_Data}
## Example: Decision tree decision surface
 \includegraphics{images/DT_Tree}
## How do we learn decision trees?
- Usually, decision trees are constructed in two phases:
1. An recursive, top-down procedure "grows" a tree\
(possibly until the training data is completely fit)
2. The tree is "pruned" back to avoid overfitting
- Both typically use *greedy heuristics*
## Top-down induction of decision trees
- For a classification problem:
1. If all the training instances have the same class, create a leaf
with that class label and exit.
2. Pick the *best test* to split the data on
3. Split the training set according to the value of the outcome of
the test
4. Recurse on each subset of the training data
## Top-down induction of decision trees
- For a regression problem - same as above, except:
- The decision on when to stop splitting has to be made earlier
- At a leaf, either predict the mean value, or do a linear fit
## Which test is best?
- The test should provide *information* about the
class label.
- Suppose we have 30 positive examples, 10 negative ones, and we are
considering two tests that would give the following splits of
instances:
\includegraphics{images/DT_Tree}
## How do we learn decision trees?
- Usually, decision trees are constructed in two phases:
1. An recursive, top-down procedure "grows" a tree\
(possibly until the training data is completely fit)
2. The tree is "pruned" back to avoid overfitting
- Both typically use *greedy heuristics*
## Top-down induction of decision trees
- For a classification problem:
1. If all the training instances have the same class, create a leaf
with that class label and exit.
2. Pick the *best test* to split the data on
3. Split the training set according to the value of the outcome of
the test
4. Recurse on each subset of the training data
## Top-down induction of decision trees
- For a regression problem - same as above, except:
- The decision on when to stop splitting has to be made earlier
- At a leaf, either predict the mean value, or do a linear fit
## Which test is best?
- The test should provide *information* about the
class label.
- Suppose we have 30 positive examples, 10 negative ones, and we are
considering two tests that would give the following splits of
instances:
 \includegraphics{images/dt-s1_v2}
## Which test is best?
\includegraphics{images/dt-s1_v2}
- Intuitively, we would like an attribute that
*separates* the training instances as well as possible
- If each leaf was pure, the attribute would provide maximal
information about the label at the leaf
- We need a mathematical measure for the purity of a set of instances
## Entropy {.smaller}
$$H(P)=\sum_{i=1}^k p_i \log_2\frac{1}{p_i}$$
- The further $P$ is from uniform, the lower the entropy
\includegraphics{images/dt-s1_v2}
## Which test is best?
\includegraphics{images/dt-s1_v2}
- Intuitively, we would like an attribute that
*separates* the training instances as well as possible
- If each leaf was pure, the attribute would provide maximal
information about the label at the leaf
- We need a mathematical measure for the purity of a set of instances
## Entropy {.smaller}
$$H(P)=\sum_{i=1}^k p_i \log_2\frac{1}{p_i}$$
- The further $P$ is from uniform, the lower the entropy
 \includegraphics{images/Entropy2}
## Entropy applied to binary classfication
- Consider data set $D$ and let
- $p_{\oplus}=$ the proportion of positive examples in $D$
- $p_{\ominus}=$ the proportion of negative examples in $D$
- Entropy measures the impurity of $D$, based on empirical
probabilities of the two classes:
$$H(D) \equiv p_{\oplus} \log_{2} \frac{1}{p_{\oplus}} + p_{\ominus}
\log_{2} \frac{1}{p_{\ominus}}$$
## Marginal Entropy
\includegraphics{images/Entropy2}
## Entropy applied to binary classfication
- Consider data set $D$ and let
- $p_{\oplus}=$ the proportion of positive examples in $D$
- $p_{\ominus}=$ the proportion of negative examples in $D$
- Entropy measures the impurity of $D$, based on empirical
probabilities of the two classes:
$$H(D) \equiv p_{\oplus} \log_{2} \frac{1}{p_{\oplus}} + p_{\ominus}
\log_{2} \frac{1}{p_{\ominus}}$$
## Marginal Entropy
| $x=$HasKids $y=$OwnsFrozenVideo ------------- ------------------- Yes Yes Yes Yes Yes Yes Yes Yes No No No No Yes No Yes No | - From the table, we can estimate $P(Y=\mathrm{Yes}) = 0.5 = P(Y=\mathrm{No})$. - Thus, we estimate $H(Y) = 0.5 \log \frac{1}{0.5} + 0.5 \log \frac{1}{0.5} = 1$. |
| $x=$HasKids $y=$OwnsFrozenVideo ------------- ------------------- Yes Yes Yes Yes Yes Yes Yes Yes No No No No Yes No Yes No | *Specific conditional entropy* is the uncertainty in $Y$ given a particular $x$ value. E.g., - $P(Y=\mathrm{Yes}|X=\mathrm{Yes}) = \frac{2}{3}$, $P(Y=\mathrm{No}|X=\mathrm{Yes})=\frac{1}{3}$ - $H(Y|X=\mathrm{Yes}) = \frac{2}{3}\log \frac{1}{(\frac{2}{3})} + \frac{1}{3}\log \frac{1}{(\frac{1}{3})}$ $\approx 0.9183$. |
| $x=$HasKids $y=$OwnsFrozenVideo ------------- ------------------- Yes Yes Yes Yes Yes Yes Yes Yes No No No No Yes No Yes No | - *The conditional entropy, $H(Y|X)$*, is the specific conditional entropy of $y$ averaged over the values for $x$: $$H(Y|X)=\sum_x P(X=x)H(Y|X=x)$$ - $H(Y|X=\mathrm{Yes}) = \frac{2}{3}\log \frac{1}{(\frac{2}{3})} + \frac{1}{3}\log \frac{1}{(\frac{1}{3})}$ $\approx 0.9183$ - $H(Y|X=\mathrm{No}) = 0 \log \frac{1}{0} + 1 \log \frac{1}{1} = 0$. - $H(Y|X) = H(Y|X=\mathrm{Yes})P(X=\mathrm{Yes}) + H(Y|X=\mathrm{No})P(X=\mathrm{No})$ $= 0.9183 \cdot \frac{3}{4} + 0 \cdot \frac{1}{4}$ $\approx 0.6887$ - Interpretation: the expected number of bits needed to transmit $y$ if both the emitter and the receiver know the possible values of $x$ (but before they are told $x$’s specific value). |
\includegraphics{images/dt-s1_v2}
## Caveats on tests with multiple values
- If the outcome of a test is *multi-valued*, the number
of possible values influences the information gain
- The more possible values, the higher the gain! (the more likely it
is to form small, but pure partitions)
- C4.5 (one famous decision tree construction algorithm) uses only binary tests:
- Attribute $=$ Value for discrete attributes
- Attribute $<$ or $>$ Value for continuous attributes
- Other approaches consider smarter metrics (e.g. gain ratio), which
account for the number of possible outcomes
## Dealing with noise in the training data
Noise is inevitable!
- Values of attributes can be misrecorded
- Values of attributes may be missing
- The class label can be misrecorded
What happens when adding a noisy example?
## Overfitting in decision trees
- Remember, decision tree construction proceeds until all leaves are
pure – all examples having the same $y$ value.
- As the tree grows, the generalization performance starts to degrade,
because the algorithm is finding *irrelevant tests*.
 \includegraphics{images/dt-train-val}
Example from (Mitchell, 1997)
## Avoiding overfitting
- Two approaches:
1. Stop growing the tree when further splitting the data does not
yield a statistically significant improvement
2. Grow a full tree, then *prune* the tree, by
eliminating nodes
- The second approach has been more successful in practice, because in
the first case it might be hard to decide if the information gain is
sufficient or not (e.g. for multivariate functions)
- We will select the best tree, for now, by measuring performance on a
separate validation data set.
## Example: Reduced-error pruning
1. Split the “training data” into a training set and a validation set
2. Grow a large tree (e.g. until each leaf is pure)
3. For each node:
1. Evaluate the validation set accuracy of pruning the subtree
rooted at the node
2. Greedily remove the node that most improves validation set
accuracy, with its corresponding subtree
3. Replace the removed node by a leaf with the majority class of
the corresponding examples.
4. Stop when pruning starts hurting the accuracy on the validation set.
## Example: Effect of reduced-error pruning
\includegraphics{images/dt-train-val}
Example from (Mitchell, 1997)
## Avoiding overfitting
- Two approaches:
1. Stop growing the tree when further splitting the data does not
yield a statistically significant improvement
2. Grow a full tree, then *prune* the tree, by
eliminating nodes
- The second approach has been more successful in practice, because in
the first case it might be hard to decide if the information gain is
sufficient or not (e.g. for multivariate functions)
- We will select the best tree, for now, by measuring performance on a
separate validation data set.
## Example: Reduced-error pruning
1. Split the “training data” into a training set and a validation set
2. Grow a large tree (e.g. until each leaf is pure)
3. For each node:
1. Evaluate the validation set accuracy of pruning the subtree
rooted at the node
2. Greedily remove the node that most improves validation set
accuracy, with its corresponding subtree
3. Replace the removed node by a leaf with the majority class of
the corresponding examples.
4. Stop when pruning starts hurting the accuracy on the validation set.
## Example: Effect of reduced-error pruning
 \includegraphics{images/dt-prune}
## Example: Rule post-pruning in C4.5
1. Convert the decision tree to rules
2. Prune each rule independently of the others, by removing
preconditions such that the accuracy is improved
3. Sort final rules in order of estimated accuracy
Advantages:
- Can prune attributes higher up in the tree *differently on
different paths*
- There is no need to reorganize the tree if pruning an attribute that
is higher up
- Often people want rules anyway, for readability
## Random Forests
- Draw $B$ bootstrapped datasets, learn $B$ decision trees.
- Average/vote the outputs.
- When choosing each split, only consider a random $\sqrt{p}$-sized subset of the features.
- Prevents overfitting
- Works extremely well
## Missing values during classification
- Assign “most likely” value based on all the data that reaches the
current node. This is a form of imputation.
- Assign all possible values with some probability.
- Count the occurrences of the different attribute values in the
instances that have reached the same node.
- Predict all the possible class labels with the appropriate
probabilities
- Introduce a value that means “unknown”
## Decision Tree Summary (1)
- Very fast learning algorithms (e.g. C4.5, CART)
- Attributes may be discrete or continuous, no preprocessing needed
- Provide a general representation of classification rules
- Easy to understand! Though…
- Exact tree output may be sensitive to small changes in data
- With many features, tests may not be meaningful
## Decision Tree Summary (2)
- In standard form, good for (nonlinear) piecewise axis-orthogonal
decision boundaries – not good with smooth, curvilinear boundaries
- In regression, the function obtained is discontinuous, which may not
be desirable
- Good accuracy in practice – many applications
\includegraphics{images/dt-prune}
## Example: Rule post-pruning in C4.5
1. Convert the decision tree to rules
2. Prune each rule independently of the others, by removing
preconditions such that the accuracy is improved
3. Sort final rules in order of estimated accuracy
Advantages:
- Can prune attributes higher up in the tree *differently on
different paths*
- There is no need to reorganize the tree if pruning an attribute that
is higher up
- Often people want rules anyway, for readability
## Random Forests
- Draw $B$ bootstrapped datasets, learn $B$ decision trees.
- Average/vote the outputs.
- When choosing each split, only consider a random $\sqrt{p}$-sized subset of the features.
- Prevents overfitting
- Works extremely well
## Missing values during classification
- Assign “most likely” value based on all the data that reaches the
current node. This is a form of imputation.
- Assign all possible values with some probability.
- Count the occurrences of the different attribute values in the
instances that have reached the same node.
- Predict all the possible class labels with the appropriate
probabilities
- Introduce a value that means “unknown”
## Decision Tree Summary (1)
- Very fast learning algorithms (e.g. C4.5, CART)
- Attributes may be discrete or continuous, no preprocessing needed
- Provide a general representation of classification rules
- Easy to understand! Though…
- Exact tree output may be sensitive to small changes in data
- With many features, tests may not be meaningful
## Decision Tree Summary (2)
- In standard form, good for (nonlinear) piecewise axis-orthogonal
decision boundaries – not good with smooth, curvilinear boundaries
- In regression, the function obtained is discontinuous, which may not
be desirable
- Good accuracy in practice – many applications