Next: Interpolation and Rational Reconstruction Up: The Euclidean Algorithm Previous: The Euclidean Algorithm
 ,
,
 ,
,
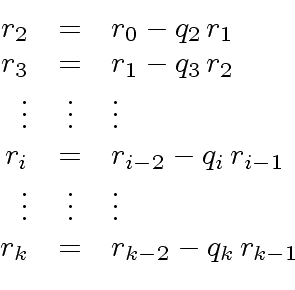
 be as in Algorithm 1.
For
be as in Algorithm 1.
For
 w.r.t.
w.r.t.  that is
that is
 |
(9) |
 |
(10) |
 .
Indeed we have
.
Indeed we have
 |
(11) |
 .
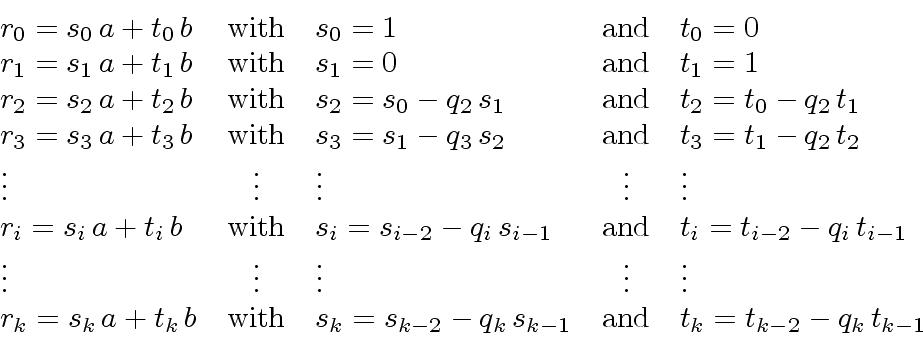
In order to compute a gcd together with its Bézout coefficients
Algorithm 1 needs to be transformed as follows.
The resulting algorithm (Algorithm 2)
is called the Extended Euclidean Algorithm.
Finally Algorithm 3 shows how to compute
the gcd together with its Bézout coefficients.
.
In order to compute a gcd together with its Bézout coefficients
Algorithm 1 needs to be transformed as follows.
The resulting algorithm (Algorithm 2)
is called the Extended Euclidean Algorithm.
Finally Algorithm 3 shows how to compute
the gcd together with its Bézout coefficients.
In order to analyze Algorithms 2 and 3 we introduce the following matrices
 |
(12) |
 |
(13) |
 and
and
 ,
for
,
for
 we have
we have
 ,
,

 ,
,

 ,
,

 and
and
 ,
,
 ,
,

 ,
,

 ,
,

 and
and
 ,
,

 ,
,

 .
.
by induction on  and
hold for
and
hold for
 .
By induction hypothesis, we have
.
By induction hypothesis, we have
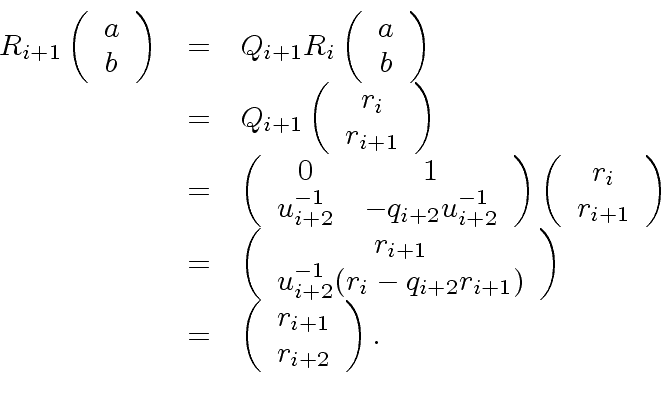 |
(14) |
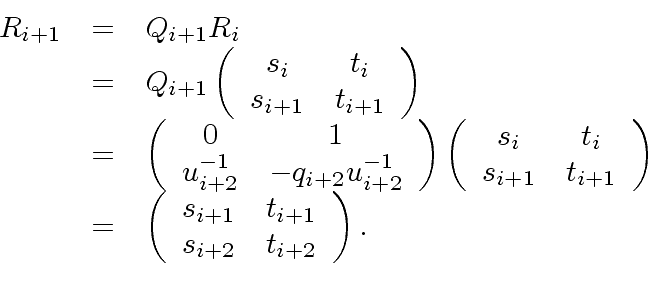 |
(15) |
follows from our study of Algorithm 1.
Claim
follows
.
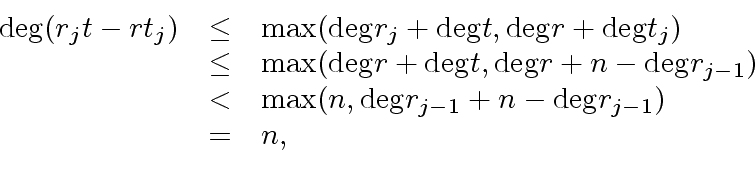
Taking the determinant of each side of
we prove 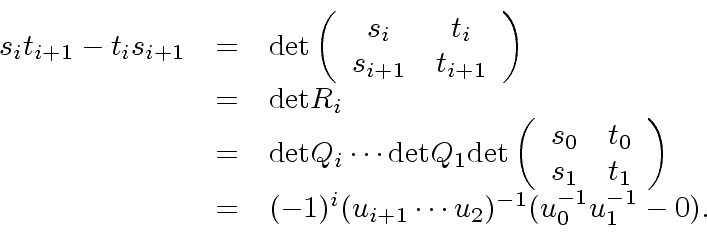 |
(16) |
.
If  .
This contradicts
.
We prove
.
Let
.
This contradicts
.
We prove
.
Let  be a divisor of
be a divisor of  , then
, then
 holds since we have
holds since we have
 from
, then
from
, then
 and, thus,
since
.
Therefore,
holds.
We prove
.
From
and
are derived from
.
and, thus,
since
.
Therefore,
holds.
We prove
.
From
and
are derived from
.
In the case
![$ R = {\bf k}[x]$](img19.png) where
where ![]() is a field,
the following Proposition 2
shows that the degrees of
the Bézout coefficients of the
Extended Euclidean Algorithm grow linearly
whereas Proposition 3
shows that Bézout coefficients are essentially unique,
provided that their degrees are small enough.
is a field,
the following Proposition 2
shows that the degrees of
the Bézout coefficients of the
Extended Euclidean Algorithm grow linearly
whereas Proposition 3
shows that Bézout coefficients are essentially unique,
provided that their degrees are small enough.
where  , we have
, we have
 |
(17) |
, we have
 |
(18) |
 for
.
for
.
 |
(19) |
.
For  |
(20) |
 |
(21) |
 and we assume that both properties
hold for
and we assume that both properties
hold for
 .
Then, by induction hypothesis, we have
.
Then, by induction hypothesis, we have
 |
(22) |
 |
(23) |
 |
(24) |
where  .
Let
.
Let
![$ r, s, t \in {\bf k}[x]$](img153.png) , with
, with  , be polynomials such that
, be polynomials such that
 be such that
be such that
 |
(26) |
![$ {\alpha} \in {\bf k}[x]$](img158.png) such that
we have
such that
we have
 |
(27) |
 and,
and,
 |
(28) |
 |
(29) |
 as unknown:
as unknown:
 |
(30) |
 is the solution.
Hence, using Cramer's rule we obtain:
is the solution.
Hence, using Cramer's rule we obtain:
 |
(31) |
 |
(32) |
 .
This implies that
of Proposition 1) we deduce that
such that
we have
.
This implies that
of Proposition 1) we deduce that
such that
we have
 .
Since
holds, we have
.
Since
holds, we have
 , leading to
, leading to
 , as claimed.
, as claimed.
![$ a, b \in {\bf k}[x]$](img181.png) where
where  .
.
 be multi-precision integers written with
be multi-precision integers written with
 word operations.
word operations.
![\fbox{
\begin{minipage}{10 cm}
\begin{description}
\item[{\bf Input:}] $a,b \in ...
...\
\> {\bf return}($r_{i-2}, s_{i-2}, t_{i-2}$) \\
\end{tabbing}\end{minipage}}](img92.png)
![\fbox{
\begin{minipage}{11 cm}
\begin{description}
\item[{\bf Input:}] $a,b \in ...
...\
\> {\bf return}($r_{i-2}, s_{i-2}, t_{i-2}$) \\
\end{tabbing}\end{minipage}}](img93.png)